
自动驾驶技术正稳步迈向新的里程碑,而Nullmax纽劢凭借其*的纯视觉自动驾驶技术,再次展示了其在这一领域的深厚实力。这项技术通过高精度摄像头与先进AI算法的深度融合,实现了自动驾驶车辆对周围环境的全面感知与精准理解,为自动驾驶行业树立了新的标杆。

Nullmax纽劢的纯视觉自动驾驶系统,能够像人类驾驶员一样,通过视觉捕捉道路上的每一个细节,包括路沿、栅栏、车道线、行人、车辆等,从而实现对复杂交通环境的实时感知。这种能力在Nullmax纽劢最新展示的7V纯视觉车辆上得到了*体现。7V纯视觉车辆能够从一条道路自主转入另一条道路,完成变道、汇入车流、绕过路边停放的车辆等一系列复杂操作,整个过程流畅自然,仿佛有一位经验丰富的驾驶员在操控。

Nullmax纽劢的端到端自动驾驶模型,将视觉信息作为主要输入,车辆只用配备基础的摄像头,根据导航系统提供的左右转等指令,就可以实现城市场景的点到点智能驾驶。而且由于传感器配置简单,所以整体算力需求也相对更低,Nullmax纽劢的技术方案可以在100T稀疏算力内实现城市场景的领航功能。即便是价位相对便宜的车型,哪怕没有配备昂贵的传感器和超大算力的芯片,也可以享受到安全、智能的体验。

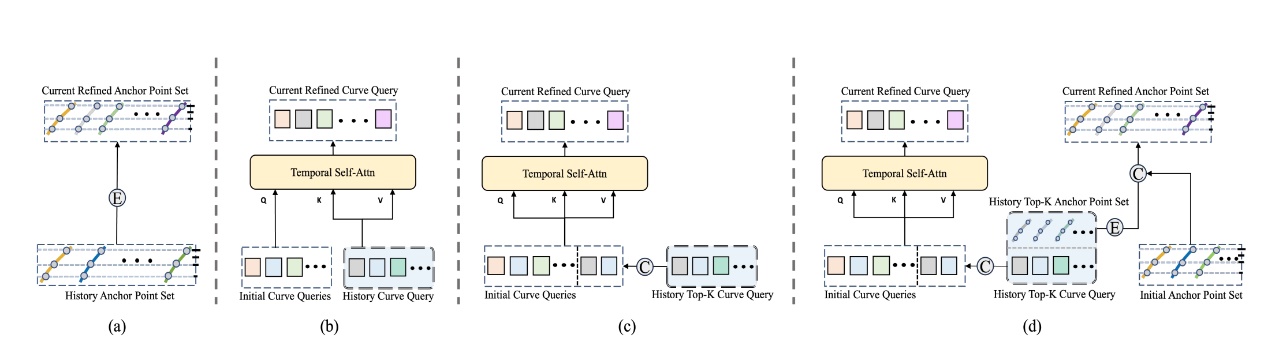
此外,Nullmax纽劢在纯视觉领域的研究也取得了丰硕成果。其研发的BEVSegFormer和CurveFormer算法,被WACV和ICRA两项国际学术会议收录。根据计算机视觉领域最顶 级期刊IEEE TPAMI的综述论文《Vision-Centric BEV Perception: A Survey》的梳理,Nullmax纽劢提出的BEVSegFormer是BEV感知方面国内最早公开发表的一项代表性研究。在纯视觉感知环境信息的基础上,Nullmax纽劢在今年2月份提出的升级算法CurveFormer++,正是探索了稀疏Query时序融合方式,让自动驾驶的静态感知、动态感知和规划像人类一样拥有“记忆”。
Nullmax纽劢坚信,纯视觉对于自动驾驶而言是一项必备、核心的技术能力,它不仅可以独立实现各种各样的任务和功能,而且也是通向无人驾驶、具身智能的关键。随着技术的不断成熟和市场的逐步拓展,Nullmax纽劢的纯视觉自动驾驶技术有望在未来几年内实现大规模商业化应用。届时,更多消费者将能够享受到由这项技术带来的安全、便捷、智能的出行体验。
清科创业(1945.HK)旗下
创业与投资资讯平台



 旗下微信矩阵:
旗下微信矩阵:
















